
تمرین شانزدهم نمایندگی زیمنس: سیستم کنترل بالابر (Elevating Platform Control) با پی ال سی لوگو
ارسال شده در تاریخ: 05 آبان 1397چاپآموزش برنامه نویسی PLC های اتوماسیون زیمنس
از طریق تمرین های کاربردی نمایندگی زیمنس
تمرین شانزدهم نمایندگی زیمنس:
کنترل حرکت بالابر، با استفاده از پی ال سی LOGO! انجام می شود. می خواهیم با فشردن یک پوشباتن، بالابر به سمت بالا حرکت کند و زمانی که به بالاترین نقطه رسید متوقف شود. همچنین با فشردن پوشباتن دیگر، بالابر را به سمت پایین حرکت دهیم و زمانی که به پایین ترین نقطه رسید به صورت خودکار متوقف شود. لازم به ذکر است زمانی که بالابر در حال حرکت به سمت بالا است نمی توان آن را با زدن پوشباتن پایین آورنده در جهت پایین به حرکت درآورد و همچنین زمانی که بالابر در حال حرکت به سمت پایین است نمی توان آن را با زدن پوشباتن بالا برنده در جهت بالا به حرکت درآورد و باید ابتدا به وسیله پوشباتن STOP آن را متوقف کرد و سپس پوشباتن مربوط به جهت مخالف را فشار داد.
در این فرآیند از چند سنسور Ultrasonic که به صورت موازی به هم وصل شده اند، برای چک کردن محیط اطراف بالابر استفاده می شود.
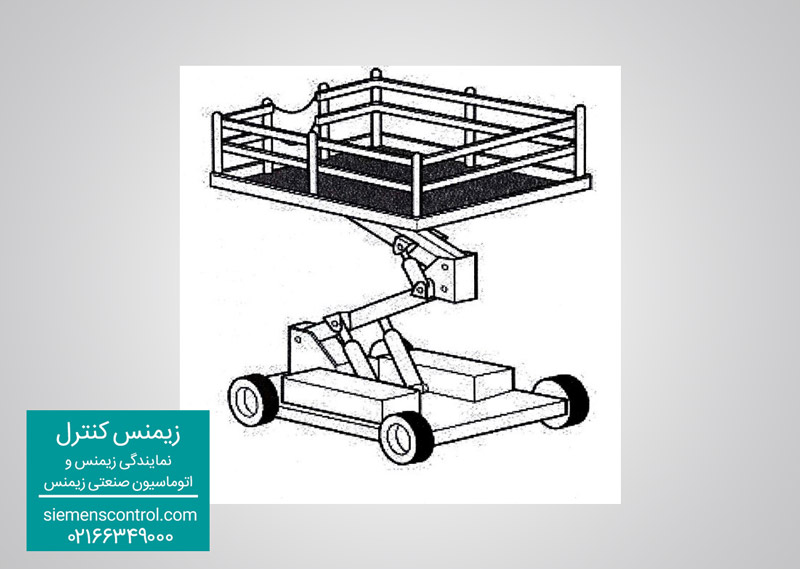
یک نمونه بالابر در شکل زیر دیده می شود.
توضیح برنامه:
بالابر را می توان با استفاده از دو پوشباتن به بالا و پایین حرکت داد. پوشباتن بالا برنده به ورودی I1 و پوشباتن پایین آوردنده به I3 وصل شده اند. رسیدن بالابر به بالاترین مکان و همچنین پایین ترین مکان توسط دو میکروسوئیچ گزارش میشود. میکروسوئیچی که به ورودی I2 وصل شده است برای بالاترین نقطه و میکروسوئیچی که به I4 متصل شده برای پایین ترین نقطه استفاده شده است. با رسیدن بالابر به هر کدام از این دو نقطه پایانی تنها می تواند در جهت مخالف حرکت کند و به جهت حرکت قبلی خود نمی تواند ادامه دهد.
حرکت بالابر را می توان در هر جایی که قرار دارد با فشردن کلید STOP که به I6 متصل شده است، متوقف کرد.
سنسورهای Ultrasonic که برای چک کردن محیط استفاده شده اند به ورودی I5 متصل شده اند. زمانی که سنسور وجود مانعی را در مسیر حرکت بالابر حس کرد آن را متوقف می کند و اگر بخواهیم بالابر را حرکت دهیم باید کلید بالا یا پایین را به مدت بیشتر از 2 ثانیه نگاه داریم. لازم به ذکر است تا زمانی که مانع برداشته نشود، برای به حرکت درآوردن بالابر، باید پوشباتن های بالا یا پایین را فشرده نگاه داریم و آن ها را رها نکنیم.
در این مدار یک پوشباتن برای توقف اضطراری (I7) نیز وجود دارد که با زدن این کلید بالابر بلافاصله متوقف می شود و همچنین کلیدهای حرکت دهنده I1 و I3 نیز تا زمانی که پوشباتن توقف اضطراری رها نشود غیر فعال باقی می ماند.
یک چراغ هشدار (Q3) هم زمانی که بالابر در حال حرکت است (چه به سمت بالا و چه به سمت پایین) چشمک می زند.
قطعات استفاده شده:
ورودی I1: پوشباتن بالابرنده (NO)
ورودی I2: میکروسوئیچ محدود کننده بالا (NO)
ورودی I3: پوشباتن پایین برنده (NO)
ورودی I4: میکروسوئیچ محدود کننده پایین (NO)
ورودی I5: سنسور Ultrasonic (NC)
ورودی I6: کلید توقف (NC)
ورودی I7: کلید توقف اضطراری (NO)
خروجی Q1: حالت بالا رفتن بالابر
خروجی Q2: حالت پایین آمدن بالابر
خروجی Q3: چراغ هشدار